Opentorque actuator
A powerful, compliant actuator for legged robotics.
description
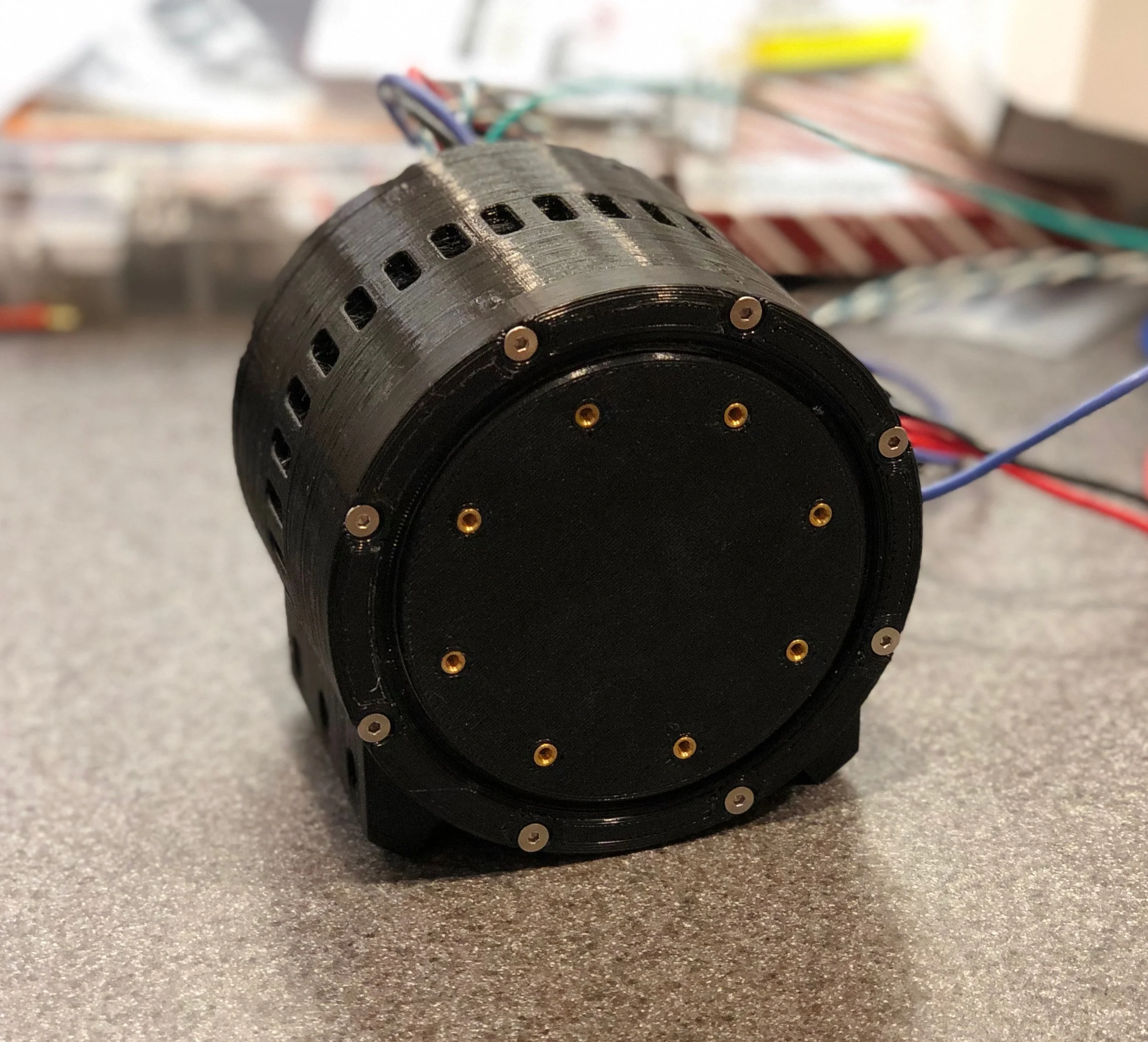
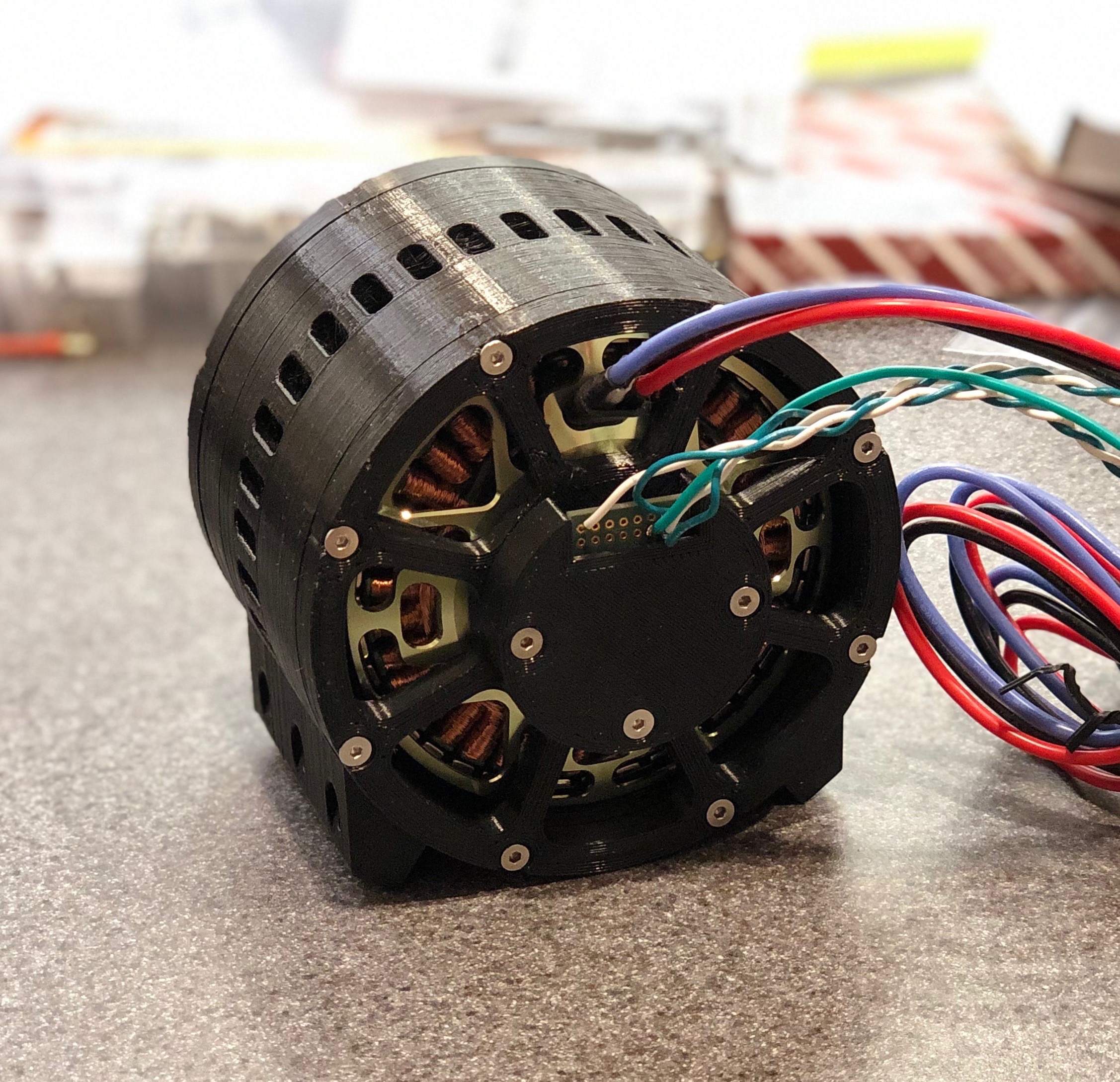
OpenTorque is an open-source implementation of the quasi-direct-drive actuation scheme pioneered by the MIT Biomimetics lab. The basic premise is this: use the largest possible motor with the smallest possible gear reduction. This results in an actuator that is robust, highly backdrivable, and capable of proprioceptive force sensing and open-loop impedance control. These are all ideal attributes for building legged robots.
open-source
The design is fully open-source. The parts can be made on a standard 3D printer.

lightweight and high-torque
The latest version of OpenTorque weighs only 1150 grams and produces 80 N-m of peak torque.
More info: https://hackaday.io/project/159404-opentorque-actuator